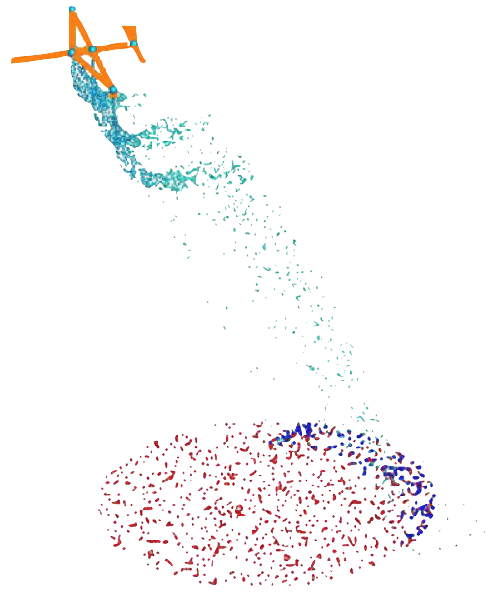
Digital Twin Example: Aerial simulation frames illustrating a digital twin of an airdrop of materials onto a target possessing strong updrafts. (Zohdi, https://msol.berkeley.edu/)
SPECIFIC AIMS:
Objective: Model and simulate precise optimal crop-dependent sensor placement and delivery via ground-based and/or aerial-based systems. This also includes the placement of other agricultural products such a fertilizer, insecticides, etc.
Specifically, we will develop clean and easy-to-use digital tools that are repeatedly in demand by food system researchers such as:
- Data collection
- Compression and assimilation from the environment
- Rapid ODE and PDE solvers
- Neural nets and genetic algorithms with embedded detailed models of fundamental physics (fluid flow, heat transfer, stress analysis, electromagnetism, optics, robotics, etc.)
GENERAL GOALS: This work develops a digital twin and machine-learning optimization framework for model problems combining:
(a) Fluid-dynamics of released objects ranging from powders to encapsulated packets and sensors
(b) Ground-based vehicle or aircraft (unmanned or manned) dynamics
(c) Energy-efficient path planning of multiple ground or air vehicles
(d) Lidar-based and hyperspectral data extraction for agricultural mapping for planning and assessment.
The framework is designed to enable digital twin type technologies to run at much faster rates, in order to enable machine-learning to optimize the planning.
The overall guiding motivation is to provide useful tools to enable rapid path planning for autonomous vehicle operators in real-time and to train operators in large surface area food systems. This project also draws on the domain expertise of the broad array of participants shown below:
Project Team
Collaboration
The projects are jointly conducted with partners through the AIFS Network:
https://aifs.ucdavis.edu/
UC Berkeley

A. Arias
(co-lead)
(sensors)

E. Ligon
(agricultural and resource economics)

S. Mäkiharju
(fluid mechanics and diagnostics)

K. Mosalam
(large-scale infrastructure)

M. Mueller
(UAVs, aerodynamics, controls)

T. Zohdi
(coordinator and co-lead)
(simulation technologies)
UC Davis

M. Earles
(comp. vision, image proc.)

I. Kisekka
(sustainable irrigation, data sci.)
X. Liu
(comm. networks, machine learning)
I. Tagkopoulos
(mach. learning, math. opt.)